Введение
Разработка, представленного робота, является темой моего дипломного проекта. Основная идея проекта - достичь роботом точки «Б» из точки «А», объехав препятствия. Возможно для кого – то это покажется простой задачей, но это мой первый робот, поэтому не все сразу…
Блок – схема робота
На рисунке 2.1 представлена блок – схема робота.

Рис. 2.1 – Блок – схема робота
Здесь стоит выделить две основные части: силовая плата и плата контроллера. К силовой плате крепятся ИК датчики TSOP 4836, дальномер Sharp GP2D120X (4-30 см.), также двигатели с энкодерами. На плате контроллера размещен дисплей, радиомодуль и непосредственно сам микроконтроллер - Atmega 1280.
Обе платы связаны между собой.
Силовая плата
На рисунке 3.1 изображена силовая плата робота. В передней части расположен генератор импульсов (для TSOP-ов) на таймере NE555.
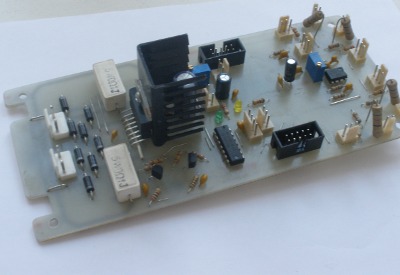
Рис. 3.1 – Силовая плата
В центральной части расположен драйвер двигателей на микросхеме L298.
Элементы конструкции
Датчик напряжения
В качестве датчика напряжения используется обычный резистивный делитель, выход которого подается на АЦП микроконтроллера (рис. 4.1.1)
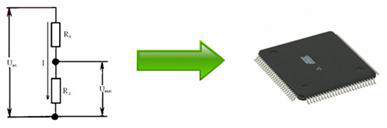
Рис. 4.1.1 – Датчик напряжения
Датчик тока
Для работы системы управления и защиты от перегрузок необходимо измерение токов двигателей (рис. 4.2.1)
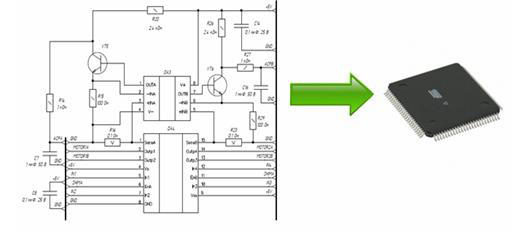
Рис. 4.2.1 – Датчик тока
ИК – сенсоры
Для более точного позиционирования робота в пространстве были выбраны ИК – сенсоры TSOP 4836 и дальномер Sharp GP2D120X. Характеристики обоих сенсоров представлены на рисунке 4.3.1
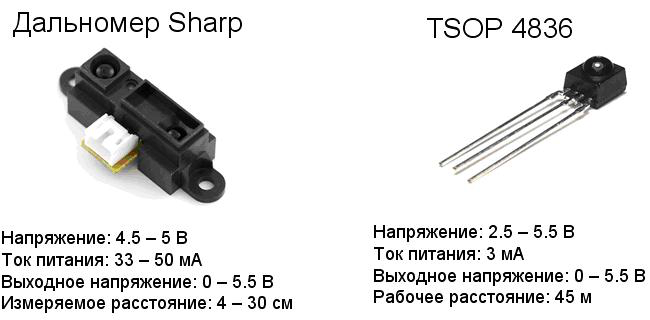
Рис. 4.3.1 ИК – сенсоры.
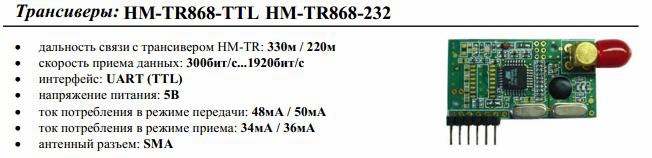
Радиомодули
Для связи с ПК использованы радиомодули(трансиверы). Характеристики представлены ниже.
Демонстрация определения расстояния до объекта
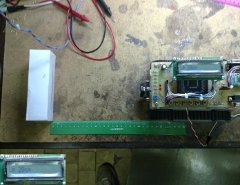
На рисунке 5.1 представлены несколько фрагментов, на которых роботом определяется расстояние до объекта. P.S извиняюсь за качество – фотографировали, тем, что было под рукой  .
.
 |
 |
 |
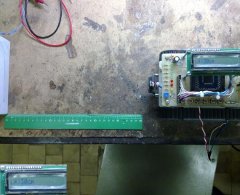 |
Рис. 5.1 – Определение расстояния до объекта
Плата контроллера
На плате расположен дисплей, микроконтроллер, радиомодуль HM-TR868.
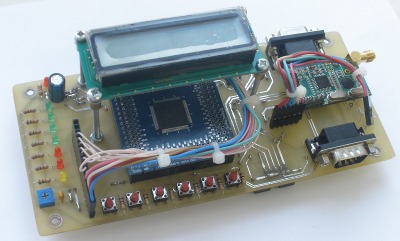
Рис. 6.1 – Плата контроллера
Связь с ПК
Для связи робота и ПК используется такой же трансивер HM-TR868. Он подключается к USB через драйвер - микросхему ft-232 (при этом используется как виртуальный COM-порт).

Рис. 7.1 – Подключение трансивера к ПК
Для отображения параметров робота разработана программа, интерфейс которой представлен ниже.
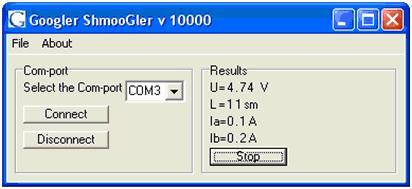
Рис. 7.2 – Интерфейс программы
Платформа
Вся конструкция крепится на платформу RP6 tank robot chassis (рисунок 8.1)

Рис. 8.1 – Платформа робота
Платформа включает в себя:
- Два редуктора;
- Шасси;
- Контактный датчик препятствий;
- Два энкодера;
- Батарейный отсек.
Характеристики:
Напряжение: 7.2-12 В;
Ток ХХ: 160-180 мА;
Максимальная скорость: 15 см / с (7.2 В);
Коэффициент редуктора: 80: 1;
Максимальный наклон: > 30 °;
Полезная нагрузка: > 7.5 кг;
Вес: 425 гр.
Вся конструкция
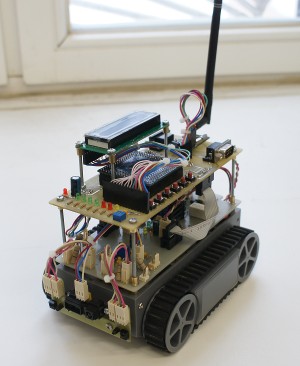
Рис. 9.1 – Вся конструкция
Благодарности
Большая благодарность моему дипломному руководителю Колесниченко Д.А. за немалую помощь при разработке!
Ссылки по теме